Com o passar dos anos, os veículos autônomos têm ganhado cada vez mais evidência. Mas não é apenas de carro que vive o transporte, então o MIT já começou a pensar em outras formas de locomoção autônoma. A primeira parada é aquática.
Nos últimos cinco anos, o Laboratório de Ciência da Computação e Inteligência Artificial do MIT (CSAIL) e o Senseable City Lab têm trabalhado em uma frota de barcos autônomos para implantar em Amsterdã, na Holanda. No ano passado, vimos os “roboats” autônomos capazes de se montar em uma série de estruturas flutuantes para diversos usos, e nesta segunda-feira (26) a CSAIL revelou o “Roboat II”, o primeiro barco autônomo capaz de transportar passageiros.
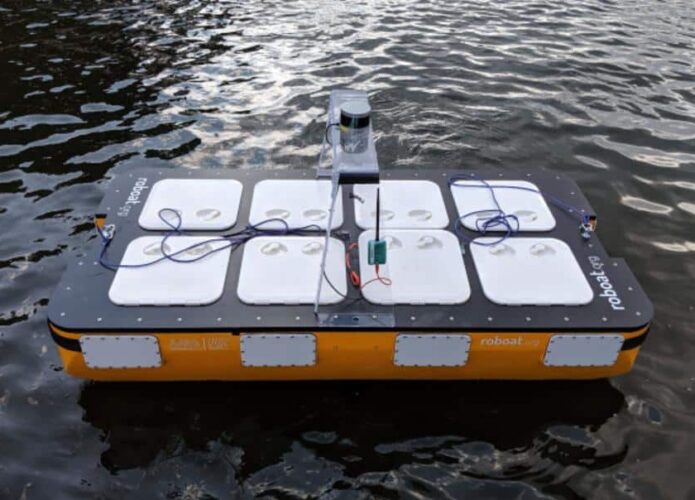
Trata-se de um barco bem pequeno, com apenas dois metros de comprimento, e com capacidade para levar dois passageiros pelos canais de Amsterdã. O Roboat II possui quatro hélices para mover-se em qualquer direção, além de incluir GPS, LiDAR e sensores inerciais para ajudá-lo a navegar. Embora um barco individual pareça pequeno, eles são modulares, tais como o primeiro Roboat. Ou seja, eles podem se automontar em uma embarcação maior comandada por um “barco líder”.
O MIT considerou o Roboat original como uma opção de “quarto de escala”, enquanto o Roboat II é de meia escala; eles trabalham lentamente até atingir o ponto de uma opção completa que possa levar de quatro a seis passageiros. Essa versão maior já está em construção em Amsterdã, mas ainda não há data para começarem os testes.
Nesse meio tempo, o Roboat II provou-se bastante eficaz para navegar nos canais holandeses. Segundo o MIT, o barco navegou autonomamente pelos canais da cidade por três horas coletando dados e voltou para onde saiu com margem de erro de menos de sete polegadas.
Futuramente, a equipe do MIT espera continuar aprimorando os algoritmos do Roboat para torná-lo mais capaz de lidar com os desafios que um barco pode encontrar, como ondas e perturbações de correntes. Eles também trabalham para torná-lo mais capaz de identificar e “compreender” os objetos que encontra, para reagir melhor ao ambiente onde está. Tudo que o Roboat II aprender será aplicado à versão em escala real que está em construção, embora ele não passe de imaginação por enquanto.
Via: Engadget
