Os robôs já são capazes de executar variadas tarefas, e a cada dia fica mais evidente que eles desempenharão inúmeros papéis em um futuro próximo, substituindo os seres humanos em muitas atividades. Para alcançar essa realidade, o Google vem desenvolvendo novas pesquisas que podem tornar o processo de aprendizado dos robôs algo muito mais direto.
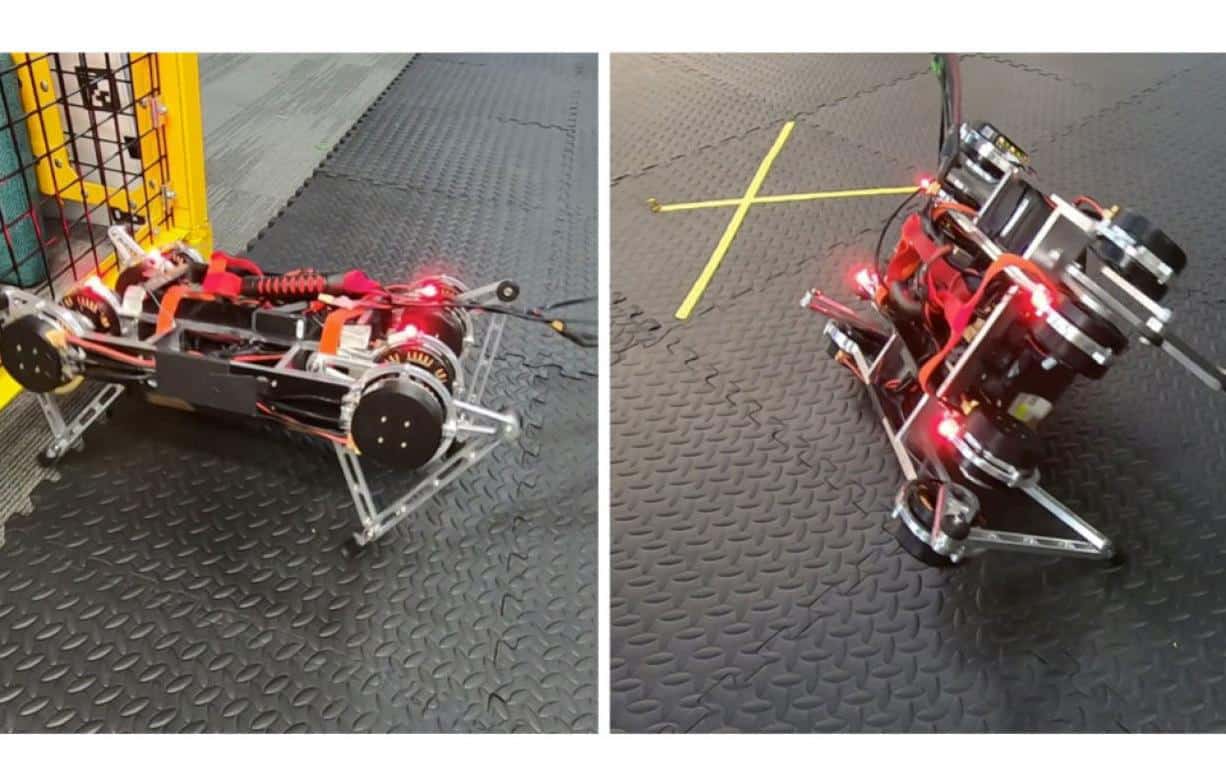
Por mais que já hajam algoritmos para ensinar um robô a se mover, a contribuição humana ainda é essencial – seja para levantar a máquina quando ela cair ou movê-la de volta ao espaço de teste caso ele se afaste. Com esse foco, pesquisadores do Google Robotics tentaram aperfeiçoar tais algoritmos. O resultado, tido como sucesso, fez um robô de quatro patas andar sozinho para trás, para frente e virar, em apenas algumas horas.
O primeiro passo foi acabar com a modelagem de ambiente. Normalmente, antes do robô se tornar real, os algoritmos são testados em um robô virtual dentro de um ambiente virtual. Isso ajuda a evitar danos reais ao autômato, contudo emular superfícies macias ou com cascalho toma-se muito tempo, além de muito trabalhoso e demorado.

Então, os pesquisadores usaram o mundo real desde o início. Assim, com as variações do ambiente natural, o robô poderia se adaptar mais rapidamente a terrenos irregulares e outras mudanças. Mesmo assim, eles tiveram que manusear o autômato diversas vezes durante o treinamento. A solução foi restringir o território do robô, fazendo com que ele aprendesse várias manobras ao mesmo tempo. Em outras palavras, se ele andasse até uma ponta do território, reconheceria o local e começaria a andar para trás, reduzindo a intervenção humana enquanto aprende uma nova habilidade.
Dessa forma, o robô passou a usar tentativa e erro, e eventualmente aprendeu a navegar autonomamente em várias superfícies diferentes, sem a necessidade de intervenção humana – um marco importante para um futuro com robôs mais úteis.
Entretanto, a pesquisa conta com algumas limitações. A configuração usada atualmente emprega um sistema suspenso de captura de movimento para identificar sua localização – não é algo que poderia ser replicado por qualquer robô do mundo real. Apesar disso, os pesquisadores esperam adaptar os novos algoritmos a diferentes tipos de robôs, ou até inserir múltiplas máquinas no mesmo ambiente de aprendizado, criando um corpo de conhecimento e entendimento que ajudará no avanço da robótica em todos os campos.
Via: Engadget
