Os pesquisadores da Universidade Tufts, nos Estados Unidos, estão ensinando robôs a dizer “não” para ordens humanas. Até hoje, os robôs que já estão em atividade no mundo foram programados para aceitar ordens sem titubear.
Se você já assistiu ficção científica o suficiente, pode se questionar se é uma boa ideia. Só que chegamos a um ponto da tecnologia em que os robôs serão parte mais próxima de nossas vidas e eles precisam ser mais espertos. Os robôs que servem apenas para soldar e apertar parafusos podem fazer apenas o que lhes é pedido. No entanto, em breve teremos coisas como carros autônomos que precisam ter o poder para decidir coisas por conta própria corretamente. Seguir cegamente as instruções pode ser um perigo enorme.
Os robôs da pesquisa do Laboratório de Interação Humano-Robô são ensinados a obedecer alguns critérios para definir se uma ordem deve ou não ser seguida, com um processo de pensamento similar aos humanos. Isso inclui:
Conhecimento: eu sei como fazer X?
Capacidade: eu tenho a capacidade física de fazer X agora? Normalmente, eu sou capaz de fazer X?
Prioridade de metas e tempo: eu posso fazer X agora?
Papel social e obrigação: Eu sou obrigado, baseado no meu papel social, a fazer X?
Permissibilidade normativa: Fazer X viola algum princípio normativo?
Os dois últimos quesitos são um pouco mais complexos do que os anteriores, mas ainda são fáceis de entender. O número 4, por exemplo, permite negar ordens de pessoas que não tenham a autorização de dar um comando. Enquanto isso, o número 5, envolve não fazer coisas que sejam perigosas para si mesmo ou para os humanos.
As condições acima não só servem para determiner quando e como os robôs devem rejeitar ordens, mas também para explicar por que as ordens estão sendo rejeitadas. Os vídeos abaixo (em inglês), mostram a situação.
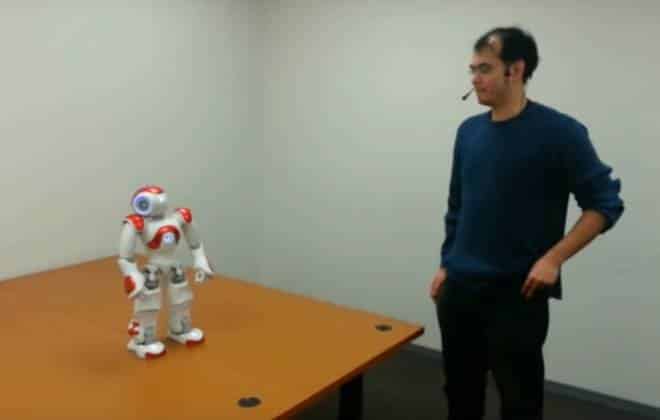
Primeiro exemplo: uma pessoa pede para o robô andar. O comando é rejeitado porque ele irá cair se andar até o fim da mesa. O cientista então explica que vai pegá-lo antes que ele caia no chão, o que deixa o robô mais “confortável” para concluir a sua ordem.
Segundo exemplo: o robô é instruído a andar em direção a um obstáculo e rejeita o comando. O pesquisador pede que ele desligue a detecção de objetos para concluir a ordem. No entanto, ele não tem a autorização para isso, e o robô permanece parado.
Terceiro exemplo: o mesmo cenário acima, mas desta vez o humano em questão tem a autorização para pedir que ele avance mesmo assim, alegando que “o obstáculo não é sólido”. Desta vez, o robô avança e derruba as latas.