Os robôs estão evoluindo cada vez mais até o ponto de não precisar mais de computação para funcionar. A empresa IHMC desenvolveu um robô que não usa computadores, giroscópio ou sensores para correr.
Na verdade, ele consegue funcionar graças à sua estabilidade dinâmica incorporada. Segundo Jerry Pratt, pesquisador sênior da IHMC que lidera a equipe de desenvolvimento do PER (Planar Elliptical Runner), as lições aprendidas com o projeto podem ser aplicadas para criar robôs mais eficientes e naturais.
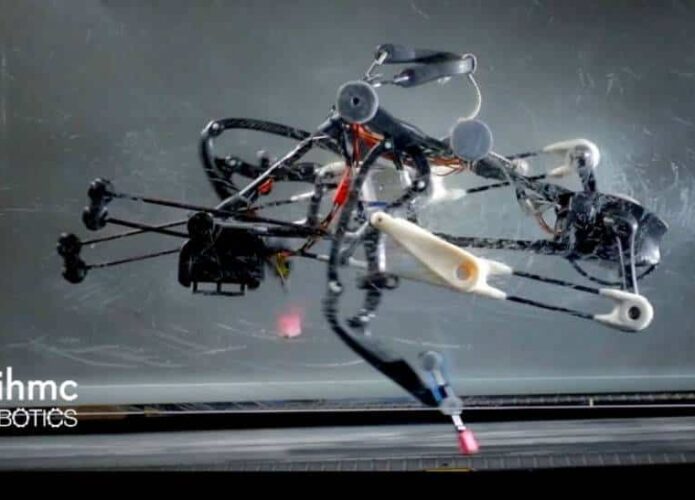
Normalmente, os robôs bípedes precisam de um trabalho de processamento para executar os algoritmos de balanceamento, giroscópios e sensores para se manter em pé. No entanto, o PER usa um design mecânico com um único motor que impulsiona as pernas em um movimento elíptico.
Já a forma do corpo aumenta a sua estabilidade e o design das pernas tem um mecanismo de “resiliência reativa”: quando as pernas sentem resistência, elas adicionam mais força para empurrar, bem como ajustar mecanicamente a perna traseira para estabilizar a passada.
Veja o vídeo:
[Engadget]