A automação é uma realidade cada vez maior no ambiente de trabalho – mas isso não quer dizer que robôs e humanos convivem em paz todos os dias. As máquinas ainda são muito estabanadas em alguns aspectos, como a leitura de movimentação. São muitas as vezes em que elas falham em prever para onde as pessoas estão andando, causando colisões e outros acidentes desagradáveis. Por sorte, pesquisadores do MIT têm uma solução para isso: um algoritmo que simula os caminhos dos indivíduos ao seu redor.
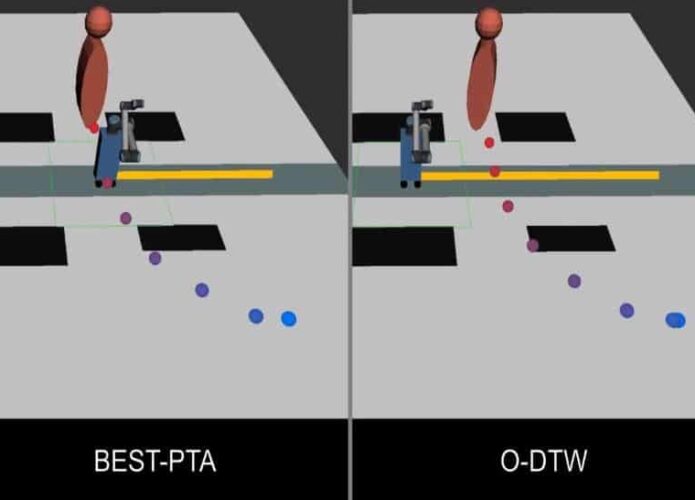
Mais do que simplesmente confiar na distância de pontos para um corpo humano – método aplicado por sistemas comuns – a nova abordagem alinha segmentos da trajetória de uma pessoa com uma coleção de movimentos de referência. Além disso, a tecnologia também considera o timing: se você acabou de iniciar a caminhada, o robô sabe que você não vai mudar de direção.
Ou seja, com este sistema eficiente em mãos, os robôs devem ficar um pouco mais confiantes, mas não imprudentes. A partir de simulações baseadas em dados anteriores de movimento humano, os pesquisadores observaram que os autômatos eram menos propensos a entrar em pânico e voltavam rapidamente a trabalhar ao identificar um indivíduo próximo.
Ainda há muito trabalho pela frente até que o algoritmo chegue em larga escala ao mundo real, mas o sistema pode se provar bastante útil. Robôs de fábrica poderiam trabalhar junto a humanos sem reduzir o ritmo ou arriscar lesões sérias. O MIT adiciona que o sistema também poderá ser aplicado em outras interações, como o reconhecimento de ações e gestos. Assim, os robôs devem ficar mais espertos quanto ao nosso comportamento.
Fonte: Engadget