A Boston Dynamics, empresa do Google focada na construção de robôs, continua desenvolvendo o Atlas para que ele consiga superar qualquer obstáculo. E, em um vídeo postado pela empresa no YouTube no final de novembro, ela mostra a última habilidade que o Atlas adquiriu: caminhar por terreno irregular e com obstáculos.
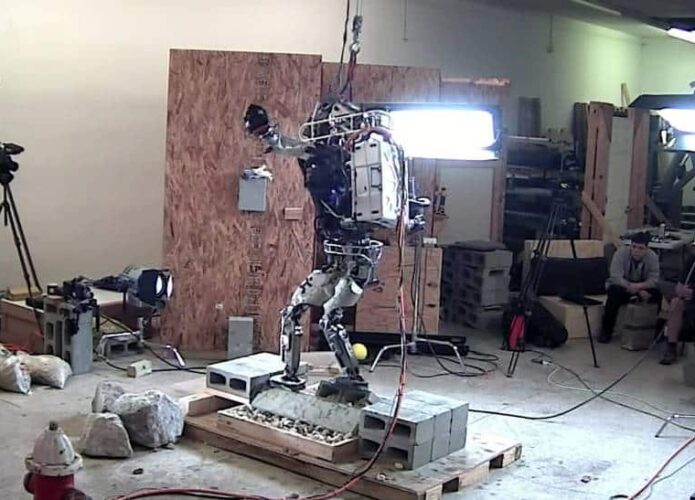
No vídeo, é possível ver o robô andando por uma simulação de terreno acidentado. Nela, os pontos de apoio para os pés do robô não são completos. Em outras palavras, a forma como ele se apoia sobre esses obstáculos precisa ser cuidadosamente calculada para que ele não caia. Embora nós sejamos capazes de fazer isso quase sem pensar, o Atlas por enquanto ainda demora um pouco. Confira no vídeo abaixo:
De acordo com a descrição do vídeo, o Atlas primeiro deixa seu peso apoiado na perna de trás, e então o transfere lentamente para a perna da frente. Enquanto faz isso, ele vai mexendo o pé da frente para encontrar a melhor maneira de distribuir seu peso sobre o pé para aproveitar o ponto de apoio.
Com essa técnica, ele se torna capaz de caminhar por “contatos lineares”: áreas nas quais o ponto de equilíbrio possível é uma linha (como um cano). No vídeo, uma animação mostra o Atlas se equilibrando também em “contatos pontuais” – quando o ponto de equilíbrio é apenas um ponto mesmo, como uma pedra pontuda -, mas ainda não é possível ver o robô fazendo isso “ao vivo”.

Primeiros passos robóticos
Enquanto o Atlas move seu pé sobre uma superfície irregular, ele vai realizando milhares de cálculos para avaliar como se equilibrar. Em seguida, ele usa o momento angular da parte superior de seu corpo para manter o equilíbrio enquanto dá o passo. O algoritmo de controle que permite que o robô faça isso foi desenvolvido pelo Institute for Human & Machine Cognition (IHMC), na Flórida.
Mas enquanto busca apoio para o passo seguinte, o Atlas precisa se equilibrar em um pé só – uma técnica que ele aprendeu apenas recentemente, em setembro. E caso ele caia, ele consegue se levantar sozinho, conforme aprendeu em fevereiro deste ano.
Todas essas técnicas poderão ser combinadas para permitir, em breve, que o robô consiga caminhar ao ar livre (e não apenas no ambiente controlado de uma oficina). Uma primeira tentativa de levar o Atlas para passear na floresta aconteceu em agosto do ano passado, e foi um pouco desengonçada.